 WEB DE INTEGRACION DE APLICACIONES
"ROBOTS Y PLC´s"
WEB DE INTEGRACION DE APLICACIONES
"ROBOTS Y PLC´s"
Robots
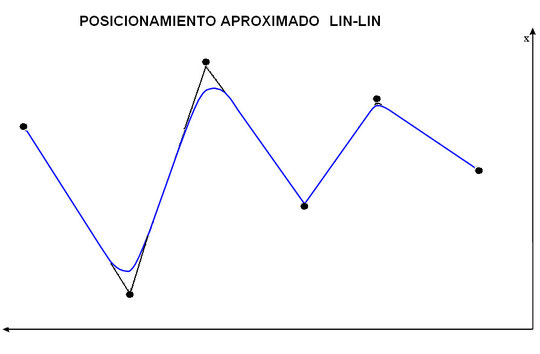
CONTROL DE POSICIONAMIENTO
Se pretende mediante la visualización de ejercicios de posicionamiento de la herramienta del robot la aplicación de los conceptos de control de la terminación de las instrucciones de movimiento en trayectorias continuas.



INFLUENCIA DE LA VELOCIDAD EN MOVIMIENTO LINEALES CON POSICIONAMIENTO APROXIMADO
En los siguientes ejemplos se aprecia la influencia de la velocidad , al realizar un cuadrado con diferentes entornos de aproximación al 100% y 50% con velocidades correspondientes al 100%, 50% y 25% de la velocidad máxima.
INFLUENCIA DE LA VELOCIDAD EN MOVIMIENTO LINEALES CON POSICIONAMIENTO DE ALTA PRECISION
En los siguientes ejemplos se aprecia que el robot mantiene la misma trayectoria correspondiente (independientemente de la velocidad programada) al realizar un cuadrado con un entorno de aproximación del 50% y un triangulo con un entorno de aproximación del 100%, con velocidades correspondientes al 100%, 50% y 25% de la velocidad máxima respectivamente.