WEB DE INTEGRACION DE APLICACIONES
"ROBOTS Y PLC´s"
WEB DE INTEGRACION DE APLICACIONES
"ROBOTS Y PLC´s"
Robots
PROGRAMACION FIGURAS GEOMETRICAS
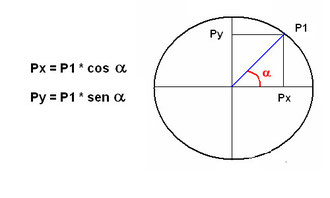
Se pretende mediante el uso de las funciones de computo +,-,*,/, y trigonométricas SIN,COS,TAN y de control del programa del robot el cálculo de vectores de posición que se usan en la aplicación de trayectorias interpoladas que describan figuras geometricas.

SOLUCION CONVENCIONAL
Programación standard punto
a punto de trayectoria circular
Desplazamiento de la herramienta del robot mediante trayectorias circulares a una velocidad determinada a las posiciones deseadas y se memorizan los puntos con un tipo de terminación de su movimiento.
Se observa que para la misma velocidad programada de las trayectorias con una precisión fina el robot para en cada punto, y con una precisión en continuo el robot no para , pero la trayectoria circular tiene una desviación.
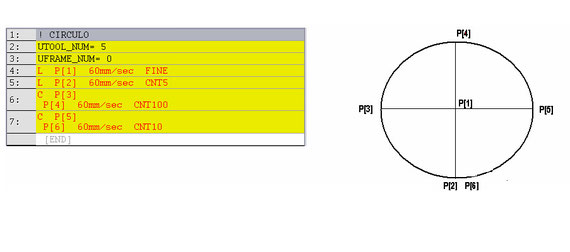
Mediante la programación standard convencional punto a punto, se requieren memorizar 4 posiciones para realizar 2 instrucciones de movimiento circular que definan la trayectoria correspondiente a la figura geometrica de un circulo
SOLUCION CONVENCIONAL OPTIMIZADA
Programación standard mediante registros de posición
definiendo una trayectoria circular
Posicionamiento de la herramienta del robot para realizar la trayectoria circular mediante la modificación de las coordenadas X e Y de 2 registros de posición que determinan el diametro sobre el eje X e Y del circulo

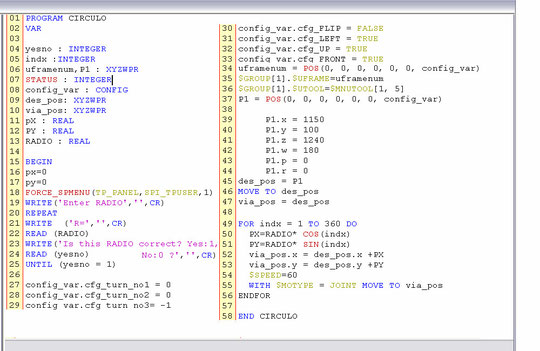
SOLUCION MEJORADA A MEDIDA
Programación avanzada mediante lenguajes textuales estructurados de alto nivel tipo pascal, basic...
Posicionamiento de la herramienta del robot para realizar la trayectoria circular utilizando operadores , funciones aritmeticas y estructuras condicionales de control de programa que se añaden a la secuencia de instrucciones del programa de movimiento del robot.